Своими руками плавный запуск асинхронного двигателя. Плавный пуск электродвигателя своими руками
Плавный пуск асинхронного двигателя – это всегда трудная задача, потому что для запуска индукционного мотора требуется большой ток и крутящий момент, которые могут сжечь обмотку электродвигателя. Инженеры постоянно предлагают и реализуют интересные технические решения для преодоления этой проблемы, например, использование схемы включения , автотрансформатора и т. д.
В настоящее время подобные способы применяются в различных промышленных установках для бесперебойного функционирования электродвигателей.
Из физики известен принцип работы индукционного электродвигателя, вся суть которого заключается в использовании разницы между частотами вращения магнитных полей статора и ротора. Магнитное поле ротора, пытаясь догнать магнитное поле статора, способствует возбуждению большого пускового тока. Мотор работает на полной скорости, при этом значение крутящего момента вслед за током тоже увеличивается. В результате обмотка агрегата может быть повреждена из-за перегрева.
Таким образом, необходимой становится установка мягкого стартера. УПП для трехфазных асинхронных моторов позволяют защитить агрегаты от первоначального высокого тока и крутящего момента, возникающих вследствие эффекта скольжения при работе индукционного мотора.
Преимущественные особенности применения схемы с устройством плавного пуска (УПП):
- снижение стартового тока;
- уменьшение затрат на электроэнергию;
- повышение эффективности;
- сравнительно низкая стоимость;
- достижение максимальной скорости без ущерба для агрегата.
Как плавно запустить двигатель?
Существует пять основных методов плавного пуска.
- Высокий крутящий момент может быть создан путем добавления внешнего сопротивления в цепь ротора, как показано на рисунке.

- С помощью включения в схему автоматического трансформатора можно поддерживать пусковой ток и крутящий момент за счет уменьшения начального напряжения. Смотрите рисунок ниже.

- Прямой запуск – это самый простой и дешевый способ, потому что асинхронный двигатель подключен напрямую к источнику питания.
- Соединения по специальной конфигурации обмоток – способ применим для двигателей, предназначенных для эксплуатации в нормальных условиях.

- Использование УПП – это наиболее передовой способ из всех перечисленных методов. Здесь полупроводниковые приборы, такие как тиристоры или тринисторы, регулирующие скорость асинхронного двигателя, успешно заменяют механические компоненты.

Регулятор оборотов коллекторного двигателя
Большинство схем бытовых аппаратов и электрических инструментов создано на базе коллекторного электродвигателя 220 В. Такая востребованность объясняется универсальностью. Для агрегатов возможно питание от постоянного либо переменного напряжения. Достоинство схемы обусловлены обеспечением эффективного пускового момента.
Чтобы достичь более плавного пуска и обладать возможностью настройки частоты вращения, применяются регуляторы оборотов.
Пуск электродвигателя своими руками можно сделать, к примеру, таким образом.
Сопряжен с высокими динамическими нагрузками. За счет массы рабочего диска, в начале вращения на ось редуктора действуют силы инерции. Это влечет за собой некоторые негативные моменты:
- Нагрузки на ось при резком старте создают инерционный рывок, который при большом диаметре и массе диска может вырвать электроинструмент из рук;
- При резкой подаче рабочего напряжения на двигатель, возникает перегрузка по току, которая проходит после набора номинальных оборотов;
- Большой крутящий момент при резком наборе оборотов преждевременно изнашивает шестерни редуктора УШМ;
- Перегрузки, которые воспринимает рабочий диск, могут разрушить его при запуске двигателя.
ВАЖНО! При запуске болгарки, всегда держите инструмент обеими руками, и будьте готовы к его удержанию. В противном случае можно получить травму. Данное предупреждение особенно актуально для тяжелых алмазных или стальных дисков.
В результате чего изнашиваются щетки и перегреваются обе обмотки электромотора. При постоянном включении и выключении электроинструмента, перегрев может оплавить изоляцию обмоток и привести к короткому замыканию, с последующим дорогостоящим ремонтом.
В некоторых случаях возможно отламывание зубьев и заклинивание редуктора.
Поэтому наличие защитного кожуха обязательно.
ВАЖНО! Во время запуска болгарки, открытый сектор кожуха должен быть направлен в сторону, противоположную от оператора.
Чтобы лучше понять механику работы, рассмотрим устройство болгарки на чертеже. Хорошо видны все элементы, испытывающие перегрузку при резком старте.
Схематический чертеж расположение рабочих органов и систем управления в болгарке
Для уменьшения пагубных воздействий резкого пуска, производители выпускают болгарки с регулировкой оборотов и плавным пуском.

Регулировка оборотов находится на рукоятке инструмента
Но таким приспособлением оснащаются лишь модели средней и высокой ценовой категории. Многие домашние мастера приобретают УШМ без регулятора и замедления пусковых оборотов. Особенно это касается мощных экземпляров с диаметром отрезного диска более 200 мм. Такую болгарку мало того что тяжело удержать в руках во время запуска, износ механики и электрической части происходит гораздо быстрее.
Выход один – установить плавный пуск болгарки самостоятельно. Существуют готовые заводские устройства с регулятором оборотов и замедлением старта двигателя при запуске.

Готовое устройство для регулировки плавного пуска
Такие блоки устанавливаются внутрь корпуса, при наличии свободного места. Однако, большинство пользователей УШМ предпочитают изготавливать схему для плавного пуска болгарки самостоятельно, и подключать ее в разрыв питающего кабеля.
Как изготовить схему плавного пуска угловой шлифовальной машины своими руками
Популярная схема реализуется на основе управляющей микросхемы фазового регулирования КР118ПМ1, а силовая часть выполнена на симисторах. Такое устройство достаточно просто монтируется, не требует дополнительной настройки после сборки, а стало быть, изготовить ее может мастер без специализированного образования, достаточно уметь держать в руках паяльник.

Электрическая схема регулировки плавного пуска для болгарки
Предложенный блок можно подключить к любому электроинструменту, рассчитанному на переменное напряжение 220 вольт. Отдельный вынос кнопки питания не требуется, доработанный электроинструмент включается штатной клавишей. Схему можно установить как внутрь корпуса болгарки, таки и в разрыв питающего кабеля в отдельном корпусе.
Наиболее практичным является подключение блока плавного пуска к розетке, от которой запитывается электроинструмент. На вход (разъем ХР1) подается питание от сети 220 вольт. К выходу (разъем XS1) подключается расходная розетка, в которую втыкается вилка УШМ.
При замыкании клавиши пуска болгарки, по общей цепи питания подается напряжение на микросхему DA1. На управляющем конденсаторе происходит плавное нарастание напряжения. По мере заряда оно достигает рабочей величины. За счет этого тиристоры в составе микросхемы открываются не сразу, а с задержкой, время которой определяется зарядом конденсатора. Симистор VS1, управляемый тиристорами, открывается с такой же паузой.
Посмотрите видео с подробным разъяснением как сделать и какую схему применить
В каждом полупериоде переменного напряжения, задержка уменьшается в арифметической прогрессии, в результате чего напряжение на входе в электроинструмент плавно возрастает. Этот эффект и определяет плавность запуска двигателя болгарки. Следовательно обороты диска возрастают постепенно, и вал редуктора не испытывает инерционного шока.
Время набора оборотов до рабочего значения определяется емкостью конденсатора С2. Величина 47 мкФ обеспечивает плавный пуск за 2 секунды. При такой задержке нет особого дискомфорта для начала работы с инструментом, и в то же время сам электроинструмент не подвергается избыточным нагрузкам от резкого старта.
После выключения УШМ, конденсатор С2 разряжается сопротивлением резистора R1. При номинале 68 кОм время разряда составляет 3 секунды. После чего устройство плавного пуска готово к новому циклу запуска болгарки.
При небольшой доработке, схему можно модернизировать до регулятора оборотов двигателя. Для этого резистор R1 заменяется на переменный. Регулируя сопротивление, мы контролируем мощность двигателя, меняя его обороты.
Таким образом, в одном корпусе можно выполнить регулятор оборотов двигателя и устройство плавного пуска электроинструмента.
Остальные детали схемы работают следующим образом:
- Резистор R2 контролирует величину силы тока, протекающую через управляющий вход симистора VS1;
- Конденсаторы С1 и С2 являются компонентами управления микросхемой КР118ПМ1, используемыми в типовой схеме включения.
Для простоты и компактности монтажа, резисторы и конденсаторы припаиваются прямо к ножкам микросхемы.
Симистор VS1 может быть любым, со следующими характеристиками: максимальное напряжение до 400 вольт, минимальный пропускной ток 25 ампер. Величина тока зависит от мощности угловой шлифовальной машины.
По причине плавного пуска болгарки, ток не будет превышать номинального рабочего значения для выбранного электроинструмента. Для экстренных случаев, например, заклинивания диска УШМ – необходим запас по току. Поэтому значение номинальной величины в амперах следует увеличить вдвое.
Номиналы радиодеталей, использованных в предлагаемой электросхеме – испытаны на УШМ мощностью 2 кВт. Запас по мощности имеется до 5 кВт, это связано с особенностью работы микросхемы КР118ПМ1.
Схема рабочая, многократно исполненная домашними мастерами.
Плавный пуск асинхронного электродвигателя необходим для продления его срока эксплуатации и минимизации работ, связанных с устранением возможных поломок.
- Прямой запуск
- Устройства плавного пуска
Необходимость плавного запуска
Для того чтобы обеспечить необходимую пусковую мощность, следует увеличить номинальную мощность питающей сети. По этой причине оборудование может значительно подорожать. Причем очевиден и перерасход электроэнергии.
Одним из недостатков асинхронного электродвигателя является большой ток пуска. Он превышает номинальный в 5 - 10 раз. Ток с большими бросками может также возникнуть при торможении двигателя или при его реверсе. Это ведет к нагреву обмоток статора, а также слишком больших электродинамических усилий в частях статора и ротора.
Если вследствие возникшей аварийной ситуации двигатель перегрелся и вышел из строя всегда рассматривается возможность его ремонта. Но после перегрева параметры трансформаторной стали изменяются. Отремонтированный электродвигатель обладает номинальной мощностью на 30% меньшей, чем у него была ранее.
Для того чтобы ток ограничить используют пусковые реакторы, автотрансформаторы, резисторы и устройства плавного пуска двигателей - софт-стартеры.
Прямой запуск
В электросхеме прямого пуска машина непосредственно подключена к сетевому напряжению питания.
На схеме выше показана характеристика пускового тока при прямом старте. При таком подключении повышение температуры в обмотках машины минимальное.
Подключение осуществляется с помощью контактора (пускателя). В схеме применяется реле перегрузки для защиты электродвигателя. Однако такой метод применим, когда нет ограничений по току.
Во время старта машины пусковой момент ограничивают, чтобы сгладить резкий рывок, вследствие которого могут выйти из строя механические части привода и подсоединенные механизмы.
По этой причине производители крупных электродвигателей запрещают их прямой пуск.
Подключение «звезда-треугольник»
Одним из основных способов запуска машины является электросхема «звезда-треугольник». Такой старт возможен, для двигателей, у которых все начала и концы обмоток выведены.
Управление стартом по этой схеме состоит из трех контакторов, реле перегрузки и реле времени, управляющим контакторами.

Первоначально коммутация с сетью происходит по схеме «звезда». Контакторы К1 и К3 замкнуты. Затем, через определенное время, обмотки переключаются автоматически на схему «треугольник». Контакты К3 размыкаются, а контакты К2, наоборот, замыкаются. Реле времени в электросхеме служит для управления их переключением. На нем выставляется время разгона двигателя. При этом пусковые токи существенно снижаются.
Для экономии на платежах за электроэнергию наши читатели советуют "Экономитель энергии Electricity Saving Box". Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Такой способ эффективен, но применяется он не всегда.
Старт через автотрансформатор
![]() Этот способ применяется с использованием в электросхеме автотрансформатора, который соединен с машиной последовательно. Он служит для того, чтобы запуск произошел при пониженном на 50 - 80% от номинального напряжении. Вследствие этого пусковой ток и вращающий пусковой момент уменьшатся. Временной интервал переключения от пониженного напряжения к полному корректируется.
Этот способ применяется с использованием в электросхеме автотрансформатора, который соединен с машиной последовательно. Он служит для того, чтобы запуск произошел при пониженном на 50 - 80% от номинального напряжении. Вследствие этого пусковой ток и вращающий пусковой момент уменьшатся. Временной интервал переключения от пониженного напряжения к полному корректируется.
Однако здесь есть и недостаток. В процессе работы машина переключается на сетевое напряжение, что приводит к резкому скачку тока.
Устройства плавного пуска
В условиях плавного старта асинхронной машины с использованием в электросхеме силового блока тиристоров подается ток несинусоидальной формы. Ускорение и торможение происходят за короткий промежуток времени. Многие собирают устройство плавного пуска своими руками. Это намного снижает его цену.
![]()
В этой схеме тиристоры подключены в цепи параллельно по встречному принципу. К общему электроду поступает управляющее напряжение. Такое устройство принято называть симистором. В случае трехфазной системы он присутствует в каждом проводе.
Для того чтобы отвести тепло, выделяемое при нагревании полупроводников, применяются радиаторы. Габариты, вес и цена устройств при этом возрастает.
Существует и другой вариант для решения проблемы нагрева. В схему подключают шунтирующий контакт. После старта контакты замыкаются. В этом случае возникает параллельная цепь, сопротивление которой меньше сопротивления полупроводников. А ток, как известно, выбирает путь наименьшего сопротивления. Пока происходит этот процесс, симисторы остывают. Пример такого подключения приведен ниже на рисунке.
![]()
Типы устройств плавного старта
Их можно разделить на четыре категории.
- Регулирующие пусковой момент. Принцип действия их таков, что они осуществляют контроль одной фазы. Но при контроле плавного старта не снижают пусковые токи. Поэтому спектр применения их ограничен.
- Регулирующие напряжение с отсутствием сигнала обратной связи. Работают они по заданной программе и являются одними из самых распространенных в использовании.
- Регулирующие напряжение с сигналом обратной связи. Их принцип действия - способность менять напряжение и регулировать величину тока в заданном диапазоне.
- Регулирующие ток с наличием сигнала обратной связи. Являются самыми современными из всех устройств подобного типа. Обеспечивают наибольшую точность управления.
 Современные устройства плавного пуска выполнены, на микропроцессорах. И это существенно увеличивает их функциональные возможности по сравнению с аналоговыми. Эти устройства называют софт-стартерами. Они увеличивают срок службы исполнительных механизмов и самих электродвигателей.
Современные устройства плавного пуска выполнены, на микропроцессорах. И это существенно увеличивает их функциональные возможности по сравнению с аналоговыми. Эти устройства называют софт-стартерами. Они увеличивают срок службы исполнительных механизмов и самих электродвигателей.
С ними старт электродвигателя происходит с постепенным увеличением напряжения. Кроме этого, регулируется время разгона и время его торможения. Для того чтобы пониженное начальное напряжение не могло в электросхеме значительно снизить пусковой момент, его устанавливают в диапазоне 30 - 60% от номинального.
Плавная регулировка напряжения дает возможность плавного ускорения двигателя до номинальной скорости.
 Необходимо отметить, что с применением софт-стартеров уменьшилось количество реле и контакторов в электрической цепи. Само по себе устройство софт-стартеров не является сложным. Они просты в монтаже и эксплуатации. Электросхема подключения показана на рисунке справа.
Необходимо отметить, что с применением софт-стартеров уменьшилось количество реле и контакторов в электрической цепи. Само по себе устройство софт-стартеров не является сложным. Они просты в монтаже и эксплуатации. Электросхема подключения показана на рисунке справа.
Однако существует ряд особенностей, которые обязательно следует учитывать при их выборе.
- Первое - это обязательный учет тока асинхронной машины. Поэтому выбор софт-стартера необходимо осуществлять учитывая полный ток нагрузки, не превышающий тока предельной нагрузки самого устройства;
- Второе - максимальное число стартов в час. Как правило, оно ограничено софт-стартером. Число запусков в час самой машины не должно превышать этот параметр;
- Третье - это напряжение самой электрической сети. Оно должно соответствовать паспортному значению устройства. Несоответствие может привести к его поломке.
Электродвигатели – самые распространенные в мире электрические машины. Ни одно промышленное предприятие, ни один технологический процесс без них не обходится. Вращение вентиляторов, насосов, перемещение лент конвейеров, движение кранов – вот неполный, но уже весомый перечень задач, решаемых с помощью двигателей.
Однако есть один нюанс работы всех без исключения электромоторов: в момент старта они кратковременно потребляют большой ток, называемый пусковым.
При подаче напряжения на обмотку статора скорость вращения ротора равна нулю. Ротор нужно стронуть с места и раскрутить до номинального частоты вращения. На это тратится значительно большая энергия, чем та, что нужна для номинального режима работы.
 Под нагрузкой пусковые токи больше, чем на холостом ходу. К весу ротора прибавляется механическое сопротивление вращению от приводимого двигателем в движение механизма. На практике влияние этого фактора стремятся минимизировать. Например, у мощных вентиляторов на момент запуска автоматически закрываются шиберы в воздуховодах.
Под нагрузкой пусковые токи больше, чем на холостом ходу. К весу ротора прибавляется механическое сопротивление вращению от приводимого двигателем в движение механизма. На практике влияние этого фактора стремятся минимизировать. Например, у мощных вентиляторов на момент запуска автоматически закрываются шиберы в воздуховодах.
В момент протекания пускового тока из сети потребляется значительная мощность, расходуемая на выведение электродвигателя на номинальный режим работы. Чем мощнее электромотор, тем большая мощность для разгона ему требуется. Не все электрические сети переносят этот режим без последствий.
Перегрузка питающих линий неизбежно приводит к снижению напряжения в сети. Это не только еще более затрудняет процесс запуска электродвигателей, но и влияет на других потребителей.
Да и сами электродвигатели во время пусковых процессов испытывают повышенные механические и электрические нагрузки. Механические связаны с увеличением вращающего момента на валу. Электрические же, связанные с кратковременным увеличением тока, воздействуют на изоляцию обмоток статора и ротора, контактные соединения и пусковую аппаратуру.
Методы снижения пусковых токов
Маломощные электромоторы с недорогой пускорегулирующей аппаратурой вполне достойно запускаются и без применения каких-либо средств. Снижать их пусковые токи или изменять частоту вращения нецелесообразно экономически.
Но, когда влияние на режим работы сети в процессе запуска оказывается существенным, пусковые токи требуют снижения. Этого добиваются за счет:
- применения электродвигателей с фазным ротором;
- использование схемы для переключения обмоток со звезды на треугольник;
- использование устройств плавного пуска;
- использование частотных преобразователей.
Для каждого механизма подходит один или несколько указанных методов.
Электродвигатели с фазным ротором
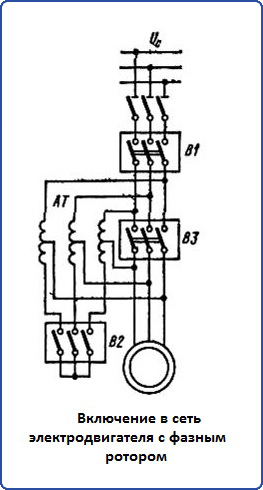 Применение асинхронных электродвигателей с фазным ротором на участках работы с тяжелыми условиями труда – самая древняя форма снижения пусковых токов. Без них невозможна работа электрифицированных кранов, экскаваторов, а также – дробилок, грохотов, мельниц, редко запускающихся при отсутствии продукции в приводимом механизме.
Применение асинхронных электродвигателей с фазным ротором на участках работы с тяжелыми условиями труда – самая древняя форма снижения пусковых токов. Без них невозможна работа электрифицированных кранов, экскаваторов, а также – дробилок, грохотов, мельниц, редко запускающихся при отсутствии продукции в приводимом механизме.
Снижение пускового тока достигается за счет поэтапного вывода из цепи ротора резисторов. Первоначально, в момент подачи напряжения, к ротору подключено максимально возможное сопротивление. По мере разгона реле времени один за другим включают контакторы, шунтирующие отдельные резистивные секции. В конце разгона добавочное сопротивление, включенное к цепи ротора, равно нулю.
Крановые двигатели не имеют автоматического переключения ступеней с резисторами. Это происходит по воле крановщика, передвигающего рычаги управления.
Переключение схемы соединения обмоток статора
 В брно (блок распределения начала обмоток) любого трехфазного электромотора выведено 6 выводов от обмоток всех фаз. Таким образом, их можно соединить либо в звезду, либо в треугольник.
В брно (блок распределения начала обмоток) любого трехфазного электромотора выведено 6 выводов от обмоток всех фаз. Таким образом, их можно соединить либо в звезду, либо в треугольник.
За счет этого достигается некоторая универсальность применения асинхронных электродвигателей. Схема включения звездой рассчитывается на большую ступень напряжения (например, 660В), треугольником – на меньшую (в данном примере – 380В).
Но при номинальном напряжении питания, соответствующем схеме с треугольником, можно воспользоваться схемой со звездой для предварительного разгона электромотора. При этом обмотка работает на пониженном напряжении питания (380В вместо 660), и пусковой ток снижается.
Для управления процессом переключения потребуется дополнительный кабель в брно электродвигателя, так как задействуются все 6 выводов обмоток. Устанавливаются дополнительные пускатели и реле времени для управления их работой.
Частотные преобразователи
Первые два метода можно применить не везде. А вот последующие, ставшие доступными относительно недавно, позволяют осуществить плавный пуск любого асинхронного электродвигателя.
Частотный преобразователь – сложное полупроводниковое устройство, сочетающее силовую электронику и элементы микропроцессорной техники. Силовая часть выпрямляет и сглаживает сетевое напряжение, превращая его в постоянное. Выходная часть из этого напряжения формирует синусоидальное с изменяемой частотой от нуля до номинального значения – 50 Гц.
За счет этого достигается экономия электроэнергии: приводимые во вращение агрегаты не работают с избыточной производительностью, находясь в строго требуемом режиме. К тому же технологический процесс получает возможность тонко настраиваться.

Но важное в спектре рассматриваемой проблемы: частотные преобразователи позволяют осуществлять плавный пуск электродвигателя, без толчков и рывков. Пусковой ток полностью отсутствует.
Устройства плавного пуска
Устройство плавного пуска электродвигателя – это тот же частотный преобразователь, но с ограниченным функционалом. Работает он только при разгоне электродвигателя, плавно изменяя скорость его вращения от минимально заданного значения до номинальной.
Чтобы исключить бесполезную работу устройства по окончании разгона электродвигателя, рядом устанавливается шунтирующий контактор. Он подключает электродвигатель напрямую к сети после завершения запуска.
При выполнении модернизации оборудования – это самый простой метод. Он зачастую может быть реализован своими руками, без привлечения узкопрофильных специалистов. Устройство устанавливается на место магнитного пускателя, управляющего пуском электромотора. Может потребоваться замена кабеля на экранированный. Затем в память устройства вносятся параметры электромотора, и оно готово к действию.
А вот с полноценными частотными преобразователями справиться самостоятельно по силам не каждому. Поэтому их применение в единичных экземплярах обычно лишено смысла. Установка частотных преобразователей оправдана лишь при проведении общей модернизации электрооборудования предприятия.
Александр Ситников (Кировская обл.)
Рассматриваемая в статье схема позволяет осуществить безударный пуск и торможение электродвигателя, увеличить срок службы оборудования и снизить нагрузку на электросеть. достигается путём регулирования напряжения на обмотках двигателя силовыми тиристорами.
Устройства плавного пуска (УПП) широко применяются в различных электроприводах. Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП - на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 - VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного
увеличения прикладываемого к обмоткам электродвигателя сетевого напряжения от некоторого начального значения Uначдо номинального Uном. Это достигается путём постепенного увеличения угла проводимости тиристоров VS1 - VS6 от минимального значения до максимального в течение времени Тпуск, называемого временем пуска.
Обычно значение Uначсоставляет 30…60% от Uном, поэтому пусковой момент электродвигателя существенно меньше, чем в случае подключения электродвигателя на полное напряжение сети. При этом происходит постепенное натяжение приводных ремней и плавное зацепление зубчатых колес редуктора. Это благоприятно сказывается на снижении динамических нагрузок электропривода и, как следствие, способствует продлению срока службы механизмов и увеличению интервала между ремонтами.
Применение УПП также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 - 4 номинала тока двигателя, а не 5 - 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности

(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
При торможении двигателя процессы происходят в обратном порядке: после отключения контактора К угол проводимости тиристоров максимален, напряжение на обмотках электродвигателя равно сетевому за вычетом падения напряжения на тиристорах. Затем угол проводимости тиристоров в течение времени Тторм уменьшается до минимального значения, которому соответствует напряжение отсечки Uотс, после чего угол проводимости тиристоров становится равным нулю и напряжение на обмотки не подается. На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.

На рисунке 4 приведены фрагменты принципиальной электрической схемы УПП. Полностью схема приведена на сайте журнала. Для её работы требуется напряжение трех фаз А, В, С стандартной сети 380 В частотой 50 Гц. Обмотки электродвигателя при этом могут быть соединены как « звездой», так и „треугольником“.
В качестве силовых тиристоров VS1 - VS6 применены недорогие приборы типа 40TPS12 в корпусе ТО-247 с прямым током Iпр= 35 А. Допустимый ток через фазу составляет Iдоп= 2Iпр= 70 А. Будем считать, что максимальный пусковой ток составляет 4Iном, откуда следует, что Iном < Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Параллельно тиристорам подключены демпфирующие RC-цепочки R48, C20, C21, R50, C22, C23, R52, C24, C25, предотвращающие ложное включение тиристоров, а также варисторы R49, R51 и R53, поглощающие импульсы перенапряжения свыше 700 В. Обходные реле К1, К2, К3 типа TR91-12VDC-SC-C с номинальным током 40 А шунтируют силовые тиристоры после завершения пуска.
Питание системы управления осуществляется от трансформаторного блока питания, запитанного от межфазного напряжения Uав. В блок питания входят понижающие трансформаторы TV1, TV2, диодный мост VD1, токоограничивающий резистор R1, сглаживающие конденсаторы С1, С3, С5, помехоподавляющие конденсаторы С2, С4, С6 и линейные стабилизаторы DA1 и DA2, обеспечивающие напряжение 12 и 5 В соответственно.
Система управления построена с применением микроконтроллера DD1 типа PIC16F873. Микроконтроллер выдаёт импульсы управления тиристорами VS1 - VS6 путём « зажигания» оптосимисторов ОРТ5-ОРТ10 (MOC3052 ). Для ограничения тока в цепях управления тиристоров VS1 - VS6 служат резисторы R36 - R47. Импульсы управления подаются одновременно на два тиристора с задержкой относительно начала полуволны межфазного напряжения. Цепи синхронизации с сетевым напряжением состоят из трёх однотипных узлов, состоящих из зарядных резисторов R13, R14, R18, R19, R23, R24, диодов VD3 - VD8, транзисторов VT1 - VT3, накопительных конденсаторов С17 - С19 и оптопар OPT2 - OPT4. C выхода 4 оптопар OPT2, OPT3, OPT4 на входы микроконтроллера RC2, RC1, RC0 поступают импульсы длительностью примерно 100 мкс, соответствующие началу отрицательной полуволны фазных напряжений Uab, Ubc, Uca.
Диаграммы работы узла синхронизации приведены на рисунке 5. Если принять верхний график за сетевое напряжение Uав, то среднийграфик будет соответствовать напряжению на конденсаторе С17, а нижний - току через фотодиод оптопары ОРТ2. Микроконтроллер регистрирует поступающие на его входы синхроимпульсы, определяет наличие, порядок чередования, отсутствие « слипания» фаз, а также производит расчёт времени задержки импульсов управления тиристорами. Входы цепей синхронизации защищены от перенапряжения варисторами R17, R22 и R27.
С помощью потенциометров R2, R3, R4 задаются параметры, соответствующие диаграмме работы УПП, приведённой на рисунке 2; соответственно R2 - Tпуск, R3 - Тторм, R4 - Uначи Uотс. Напряжения уставок с движков R2, R3, R4 поступают на входы RA2, RA1, RA0 микросхемы DD1 и преобразуются с помощью АЦП. Время пуска и торможения регулируется в пределах от 3 до 15 с, а начальное напряжение - от нуля до напряжения, соответствующего углу проводимости тиристора в 60 электрических градусов. Конденсаторы С8 - С10 - помехоподавляющие.
Команда « ПУСК» подаётся путём замыкания контактов 1 и 2 разъёма XS2, при этом на выходе 4 оптопары OPT1 появляется лог. 1; конденсаторы С14 и С15 производят подавление колебаний, возникающих вследствие „дребезга“ контактов. Разомкнутому положению контактов 1 и 2 разъёма XS2 соответствует команда „СТОП“. Коммутацию цепи управления запуском можно реализовать кнопкой с фиксацией, тумблером или контактами реле.
Силовые тиристоры защищены от перегрева термостатом B1009N с нормально-замкнутыми контактами, размещёнными на теплоотводе. При достижении температуры 80°С контакты термостата размыкаются, и на вход RC3 микроконтроллера поступает уровень лог. 1, свидетельствующий о перегреве.
Светодиоды HL1, HL2, HL3 служат индикаторами следующих состояний:
- HL1 (зелёный) « Готовность» - отсутствие аварийных состояний, готовность к запуску;
- HL2 (зелёный) « Работа» - мигающий светодиод означает, что УПП производит пуск или торможение двигателя, постоянное свечение - работа на байпасе;
- HL3 (красный) « Авария» - свидетельствует о перегреве теплоотвода, отсутствии или „слипании“ фазных напряжений.
Включение обходных реле К1, К2, К3 производится путём подачи микроконтроллером лог. 1 на базу транзистора VT4.
Программирование микроконтроллера - внутрисхемное, для чего используется разъём XS3, диод VD2 и микропереключатель Дж1. Элементы ZQ1, C11, C12 образуют цепь запуска тактового генератора, R5 и С7 - цепь сброса по питанию, С13 осуществляет фильтрацию помех по шинам питания микроконтроллера.
На рисунке 6 приведён упрощённый алгоритм работы УПП. После инициализации микроконтроллера вызывается подпрограмма Error_Test, которая определяет наличие аварийных ситуаций: перегрев теплоотвода, невозможность синхронизироваться с сетевым напряжением вследствие потери фазы, неверного подключения к сети или сильных помех. Если аварийная ситуация не фиксируется, то переменной Error присваивается значение «0
», после возврата из подпрограммы зажигается светодиод „Готовность“, и схема переходит в режим ожидания команды „ПУСК“. После регистрации команды „ПУСК“ микроконтроллер производит аналого!цифровое преобразование напряжений уставок
на потенциометрах и расчёт параметров Тпуск и Uнач, после чего выдаёт импульсы управления силовыми тиристорами. По окончании пуска включается байпас. При торможении двигателя процессы управления выполняются в обратном
порядке.